Development of a flexible and adaptable spatial structural system
This research project builds upon a bottom-up design logic leading to an informed design strategy in the development of a reconfigurable non-standard structure. This may enable modularity and reconfigurable on the one side and optimized structural behavior as to time varying functional or environmental conditions on the other side. The suggested system consists of individual hinge-connected structural units geometrically defined as pairs of inclined equilateral triangles, that interact with each other and are controlled at local level through structural behavioral rules based on parametric physics-based simulation and kinetic analysis. Aim is to achieve design, construction and kinetic control of the proposed system, exhibiting at the same time self-organized behavior of its units. In general, the bottom-up strategies that evolve interaction behavior between individual entities and in turn the self-organized emerged results are correlated with the form-finding procedures for mass minimization, whereas individual particles under self-loading conditions are stabilized in space following the idea of hanging-chain technique.
Captions
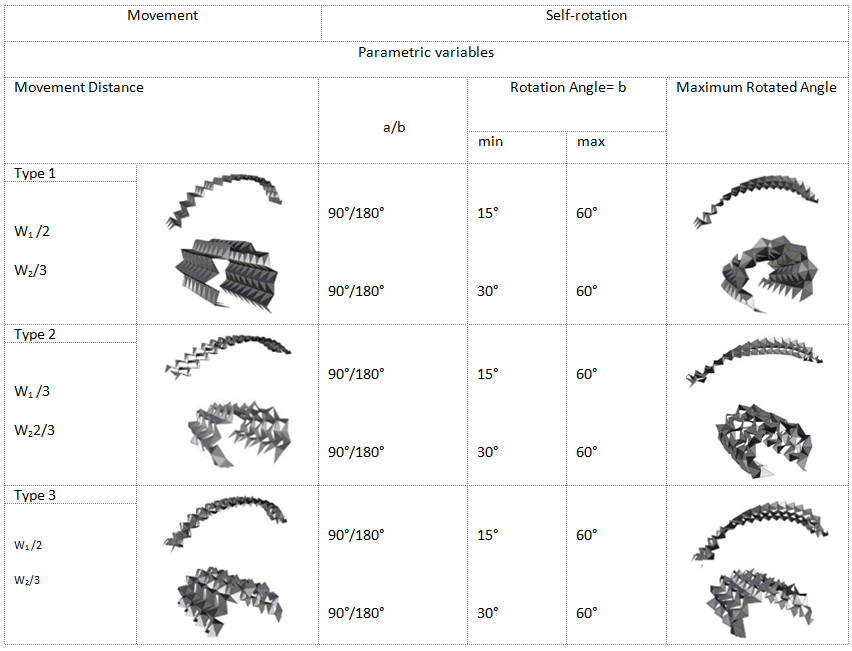
1 – Self-rotation between individual units and overall behaviour
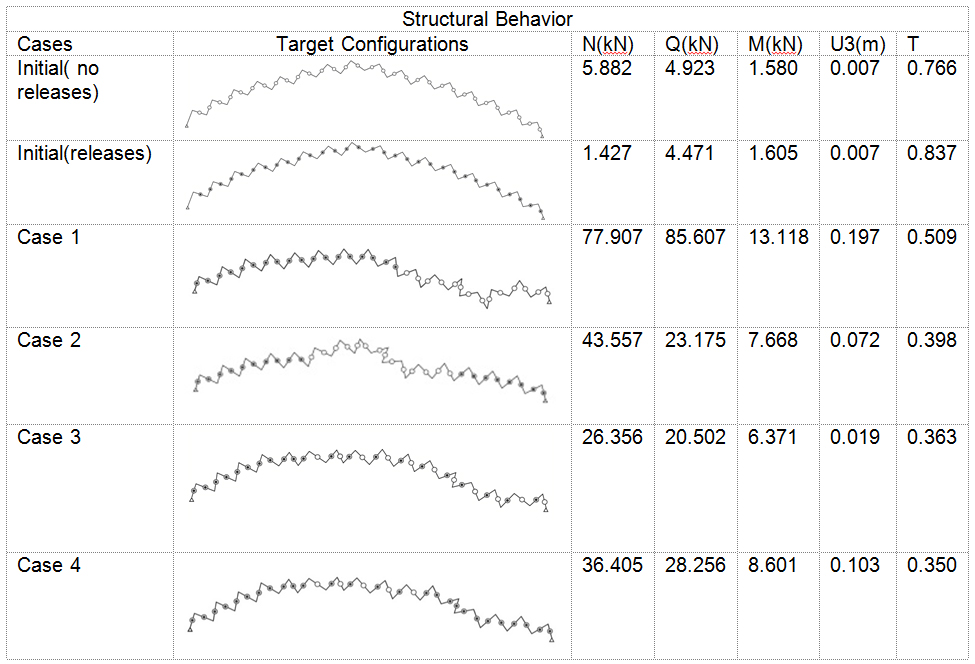
2 – Actuation case 1 and results obtained
3 – Actuation case 2 and results obtained
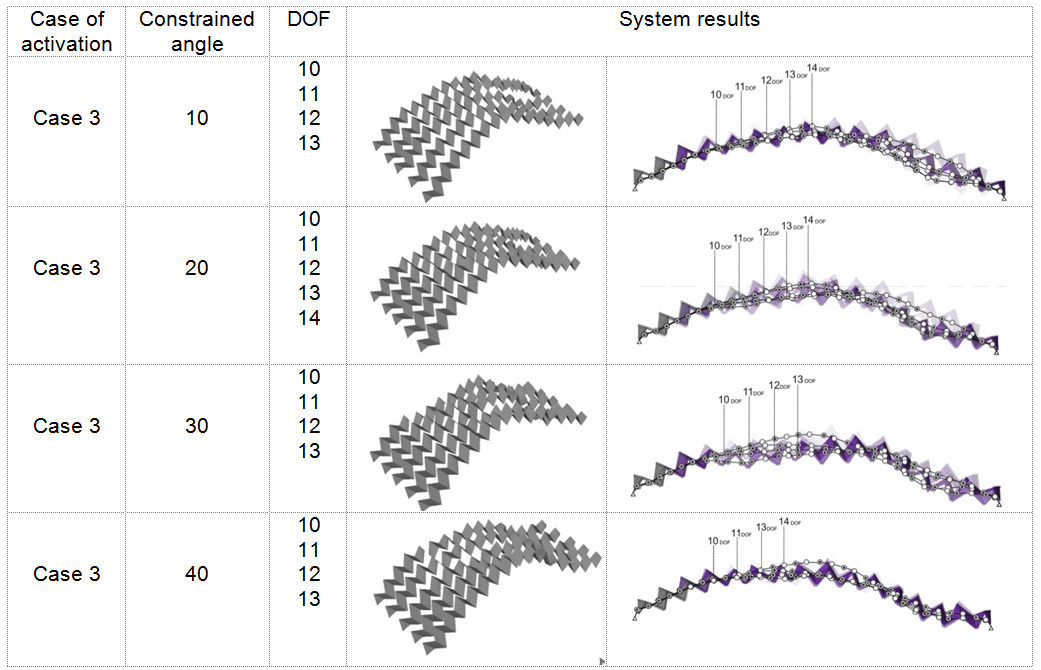
4 – Actuation case 3 and results obtained
5 – Actuation case 4 and results obtained
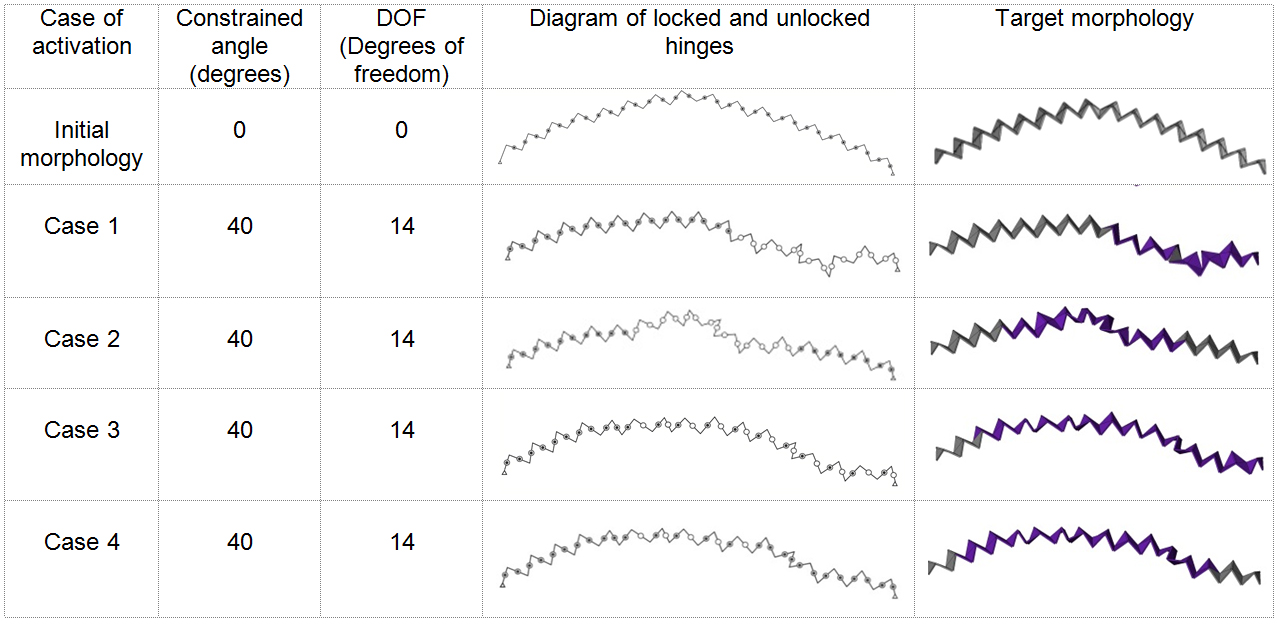
6 – Diagrams of four actuation scenarios
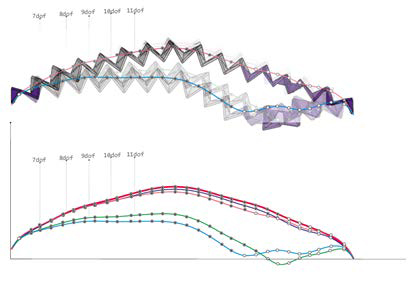
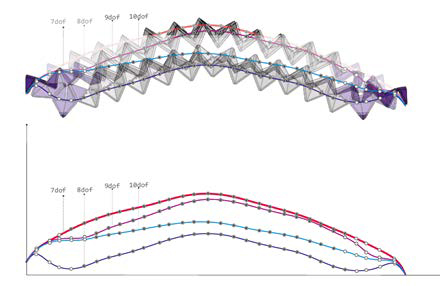
7 – System results of actuation case 3
8 – Structural analysis of the initial chain and the selected transformed chains
Internal Research Program, Department of Architecture, University of Cyprus
Research Team:
- O. Kontovourkis
- M.C. Phocas,
- E.G. Christoforou
- P. Konatzii
Publications
- Kontovourkis, O., Phocas, M.C., Christoforou, E. G., Konatzii, P., 2014. Informed design strategy for the development of a reconfigurable modular structure. In: M. Voyatzaki, ed. Proceedings of the ENHSA International Conference What’s the matter: Materiality and Materialism at the Age of Computation. Barcelona: COAC, ETSAB, ETSAV, pp. 753-767
- Kontovourkis, O., Phocas, M.C., Konatzii, P., 2015. Bottom-up design, construction and control of a reconfigurable structural system. Journal of the International Association of Shell and Spatial Structure: J.IASS, Vol. 56, No. 2, pp. 101-112