Tensile Robotics
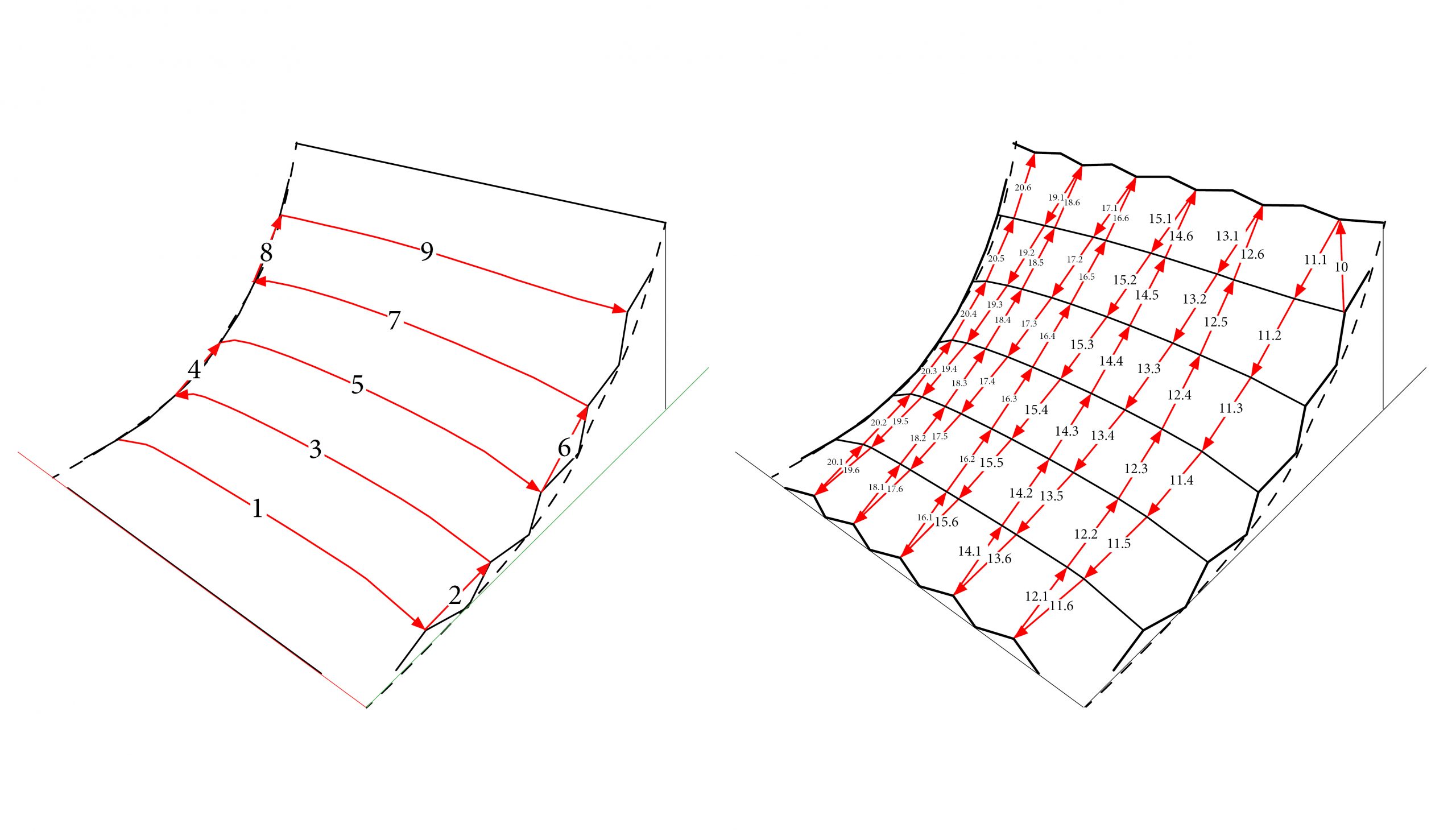
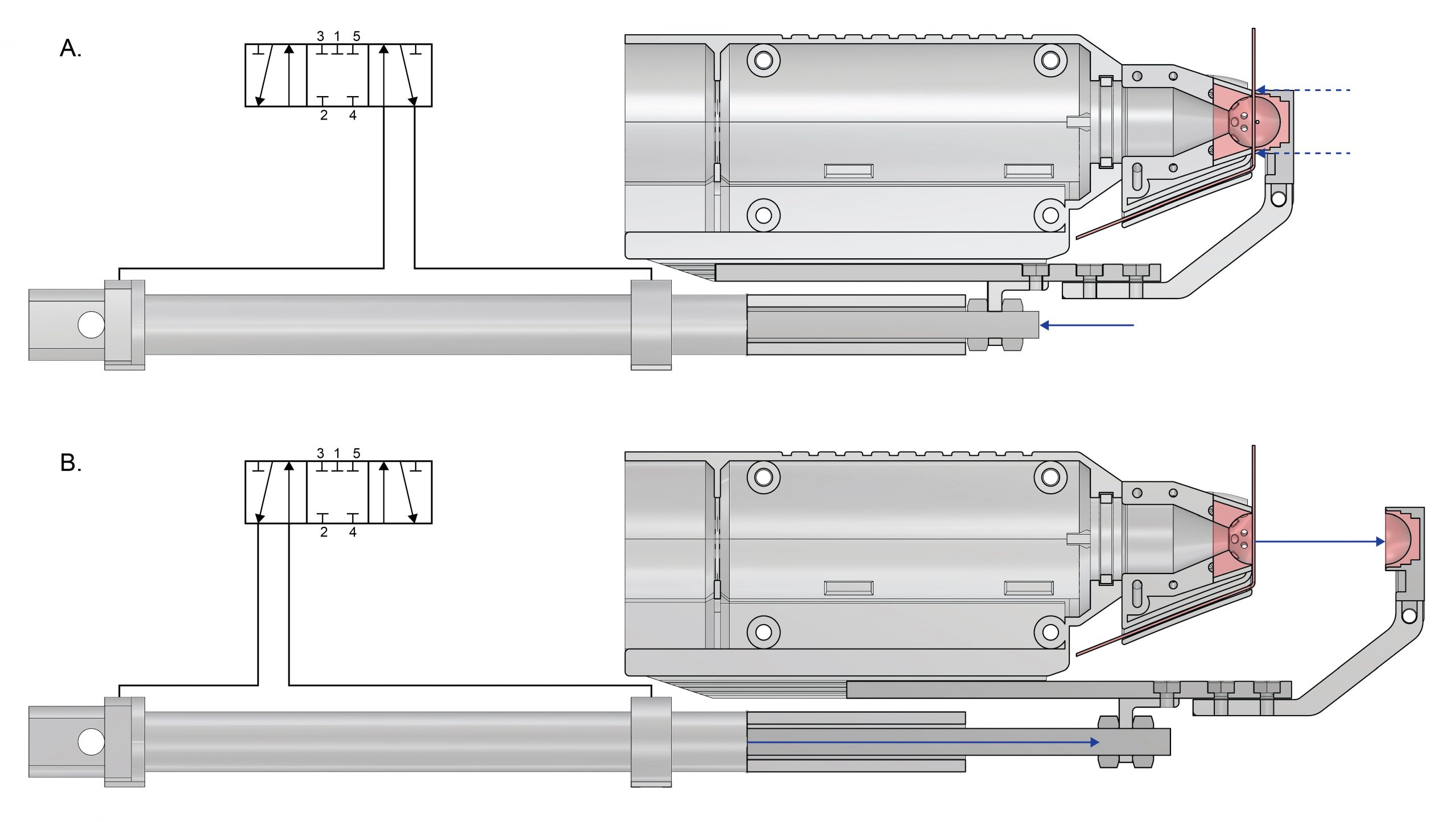
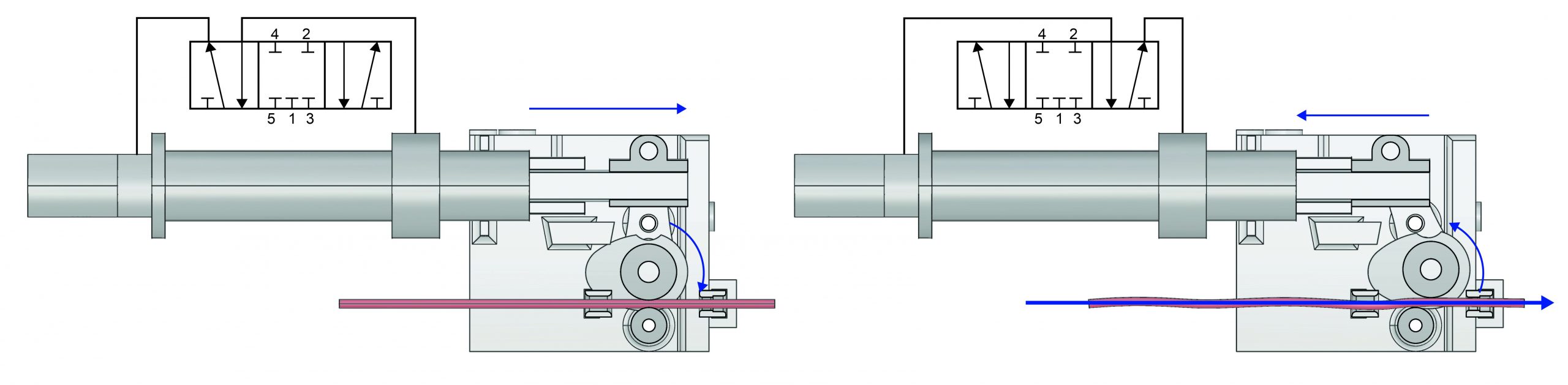
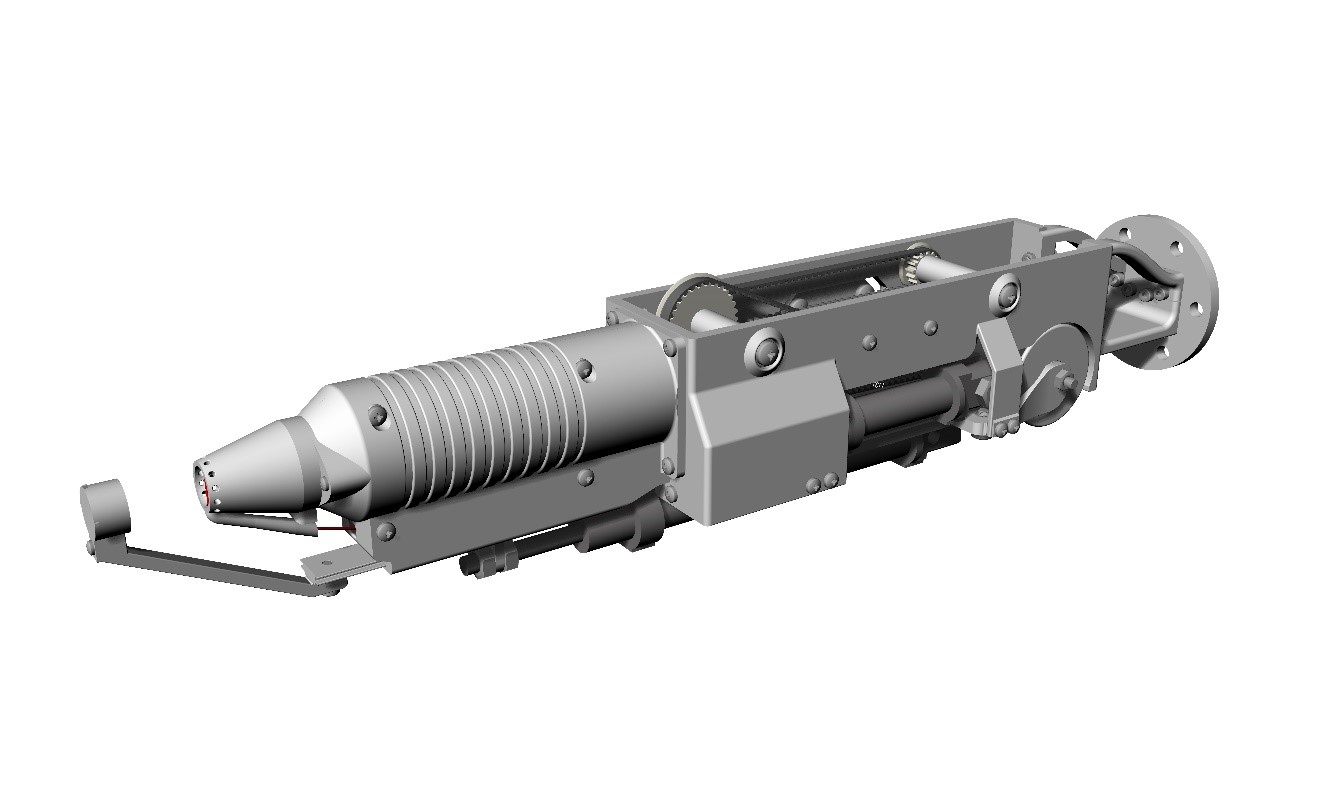
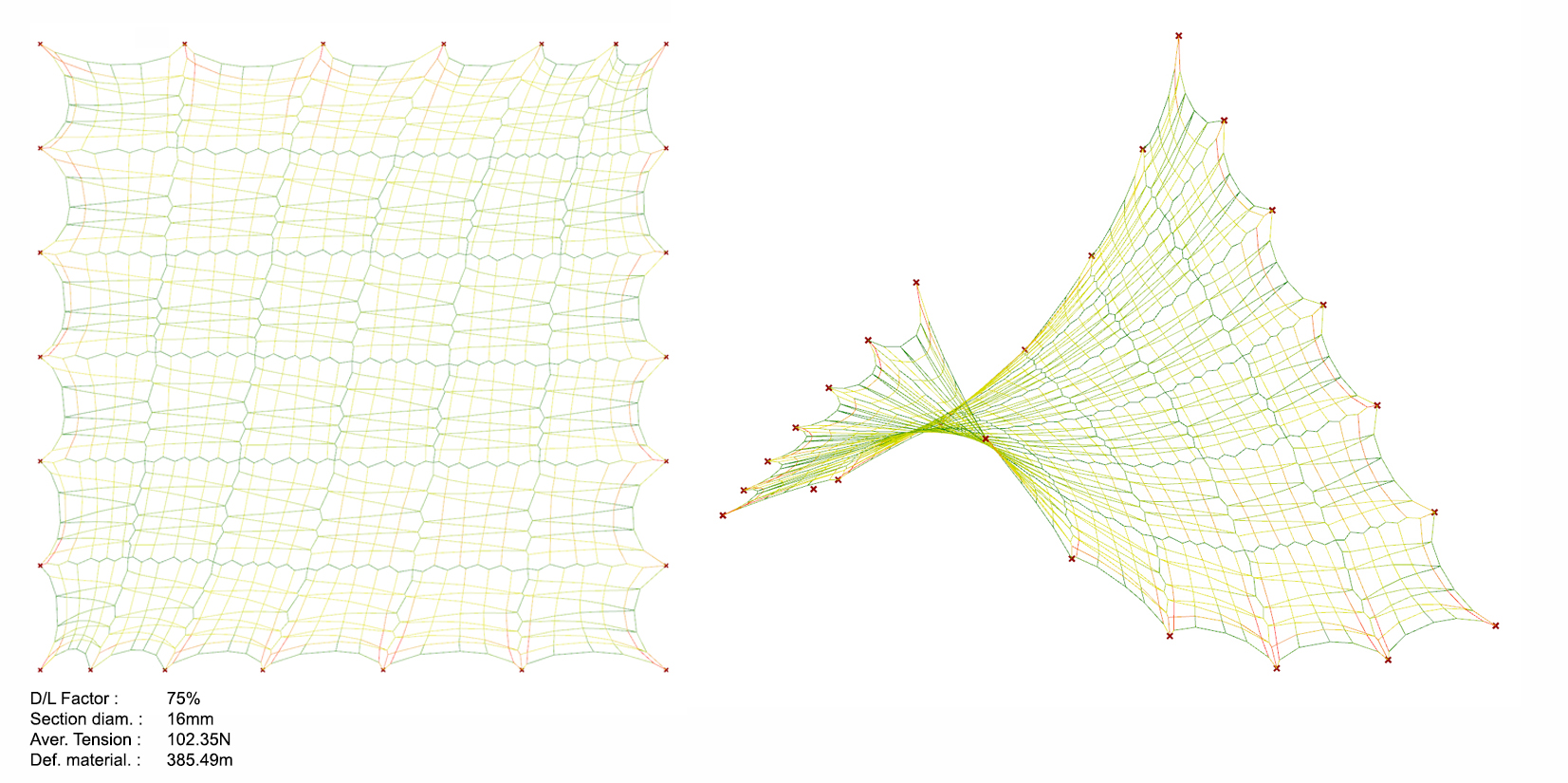
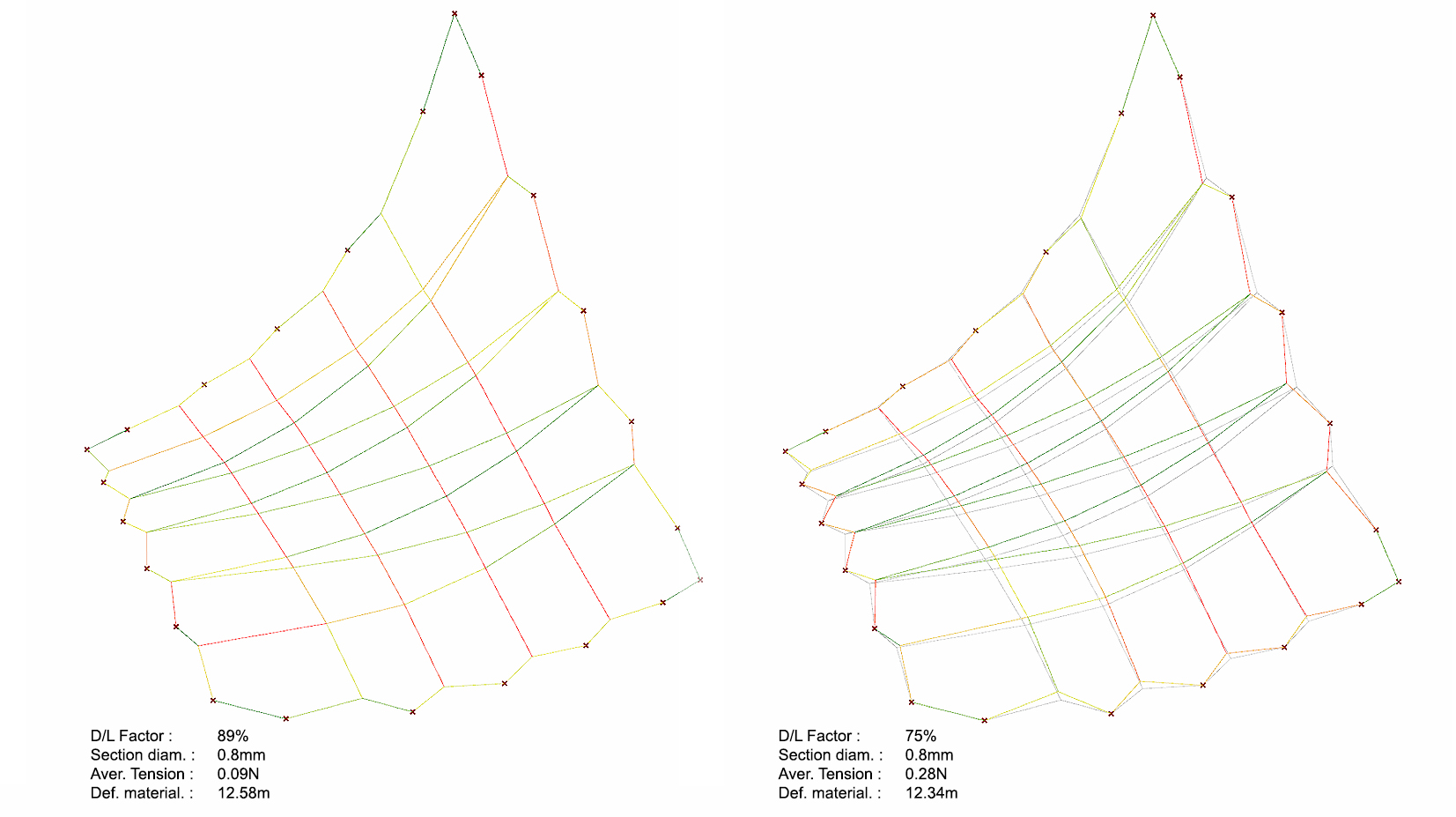
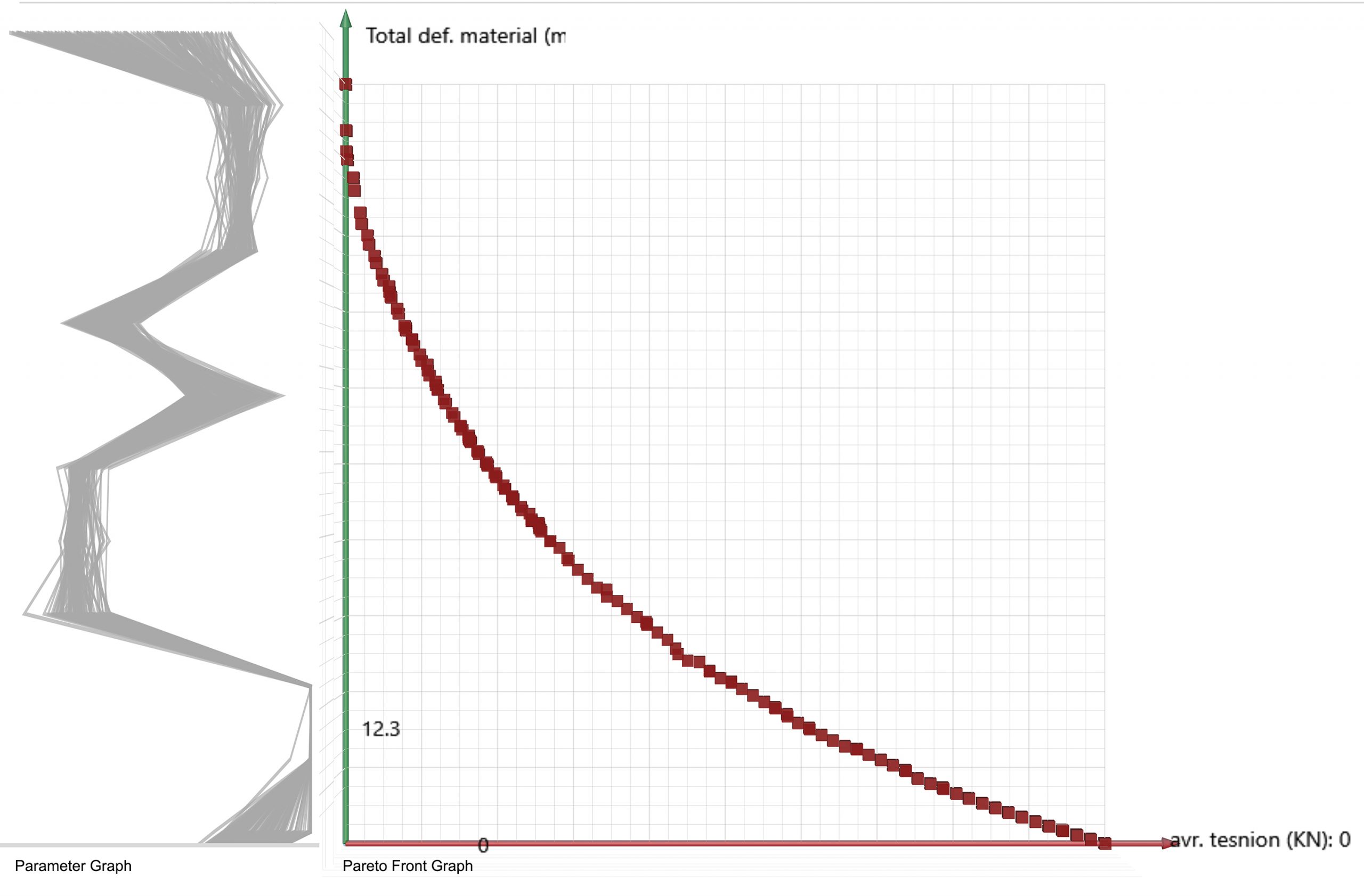
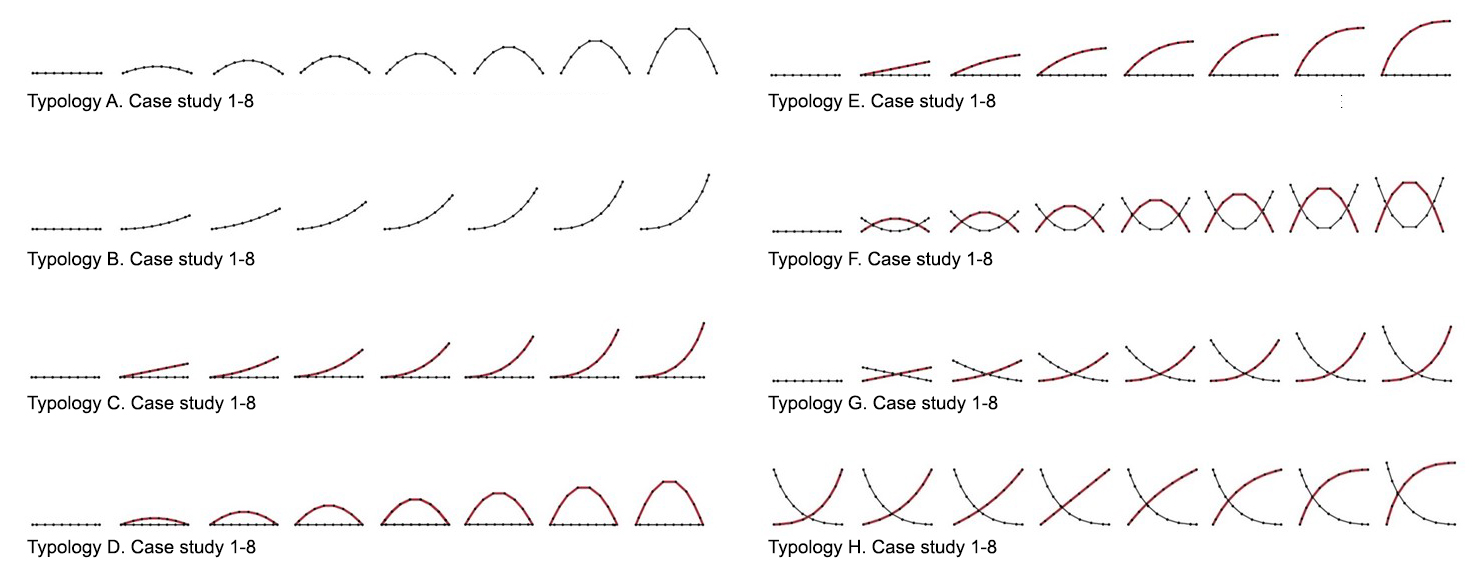
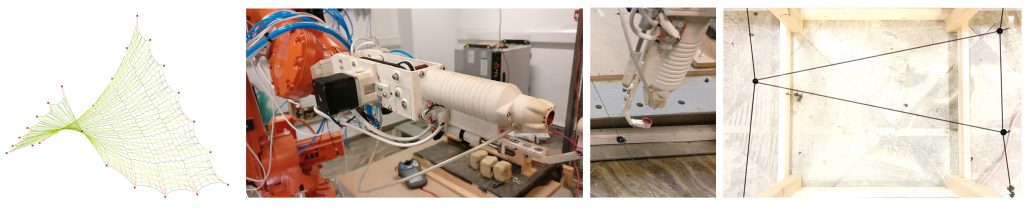
This research presents an ongoing work towards the development of an integrated robotically-driven workflow that can be used for the design, development and subsequent fabrication of small-to large-scale elastic tensile mesh structures. This approach involves digital form-finding and optimization, driven by robotic manufacturing principles and it aims to overcome the limitations of currently available tools, to work either in the design or the fabrication phase of the process. At the same time, it involves the fabrication of systems in several scales followed by respective analyses of results according to the specific type and diameter of the material used. Specifically, form-finding and optimization are responsible for controlling the pretension of the elastic threads, aiming to determine the final tensile mesh and to generate the additive robotic tool-path. In parallel, the type and diameter of the material involved, define the necessary changes of the end-effector tool, which is responsible to implement the process. Despite that design results can be in any scale, for study purposes an experimentation into a small-scale is conducted, to evaluate the suggested automated construction process in general and the end-effector mechanism in particular.
Ph.D Research, Department of Architecture, University of Cyprus
Research Team:
- O. Kontovourkis
- G. Tryfonos
Publications
- Kontovourkis O., Tryfonos G., An integrated robotically-driven workflow for the development of elastic tensile structures in various scales. Sustainable Computational Workflows, 6th eCAADe Regional International Workshop Proceedings, Department of Architecture, University of Cyprus, Nicosia, Cyprus, 24-25 May 2018, pp. 111-120 [link]
- Kontovourkis, O. and Tryfonos, G., 2016. Design optimization and robotic fabrication of tensile mesh structures: The development and simulation of a custom-made end-effector tool. International Journal of Architectural Computing, SAGE, Vol. 14, No. 4, pp. 333-348
- Kontovourkis, O., Tryfonos, G., 2015. Robotic Fabrication of Tensile Mesh Structures and Real Time Response. The Development and Simulation of a Custom-Made End Effector Tool. Ιn: B. Martens, G. Wurzer, T. Grasl, W. E. Lorenz, R. Schaffranek, eds. Proceedings of the 33th Conference on Education in Computer Aided Architectural Design in Europe: Real Time – Extending the Reach of Computation (Volume 2). Wien: Technical University of Wien, pp. 389-398